
Suite à notre dernier cycle de développement, nous avons mené une étude comparative rigoureuse de notre technologie de détection par boucle virtuelle aux capteurs à boucle inductive traditionnels, la norme de référence du secteur depuis de nombreuses années en matière de détection du trafic. Les résultats ont confirmé les objectifs de notre équipe : lors d’une évaluation en conditions réelles, nos boucles virtuelles ont atteint un taux de correspondance des événements avec les boucles inductives de 99,83 %, démontrant ainsi des performances équivalentes à celles des infrastructures physiques qui dominent le secteur depuis des décennies.
Le défi que nous avons entrepris de résoudre
Les capteurs à boucle inductive ont gagné leur réputation. Intégrés directement dans les surfaces routières, ils fournissent des données de détection de véhicules fiables et précises. Mais cela a un coût : un investissement d'installation significatif, des perturbations routières et des exigences de maintenance continues qui représentent un véritable fardeau pour les opérateurs et les budgets d'infrastructure.
Nos boucles virtuelles ont été conçues comme une alternative plus intelligente. Alimentées par des capteurs LiDAR et des algorithmes d'IA avancés, elles offrent la même capacité de détection sans toucher la surface de la route. Comparées à d'autres alternatives de boucles inductives telles que les solutions basées sur des caméras, le LiDAR présente un avantage particulièrement important : il suit les véhicules avec une grande précision, quelles que soient les conditions météorologiques ou d'éclairage, que cela signifie de fortes pluies, un brouillard dense ou une obscurité totale. De plus, cela se fait à des distances plus grandes que celles que les capteurs inductifs traditionnels peuvent atteindre.
Combler cet écart de précision avec les homologues physiques a toujours été la partie difficile. Avec ce dernier développement, c'est résolu.
Comment Nous Avons Mesuré la Précision
Dans cette référence, « précision » fait référence à l'appariement des événements entre les deux systèmes. En pratique, cela signifie : pour chaque événement de détection de boucle inductive, nous avons vérifié s'il avait un événement de boucle virtuelle correspondant unique. Le résultat reflète un site spécifique, une période de temps et une configuration. La performance de l'appariement des événements peut varier en fonction du contexte et de la géométrie de la route (par exemple, la configuration de la route et de la boucle inductive).
Sur une période de 10 jours, en utilisant des données recueillies à partir de huit boucles inductives à un carrefour urbain, 99,83 % des événements de boucle inductive ont trouvé une correspondance unique dans les données de boucle virtuelle. Cette métrique fournit une indication claire de la manière dont les boucles virtuelles peuvent reproduire les événements de détection sur lesquels les opérateurs de la circulation s'appuient déjà.
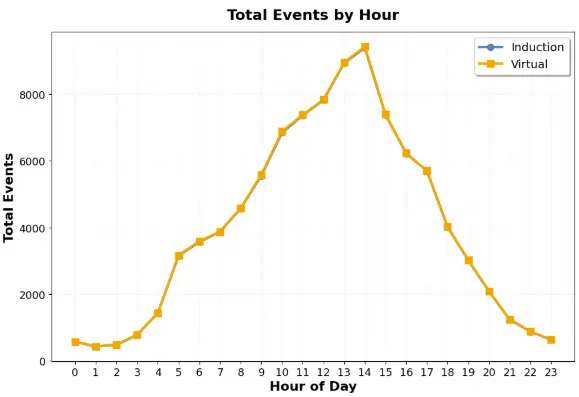
Sur ce graphique linéaire, les lignes d'événements de boucle inductive et de boucle virtuelle se superposent largement car les détections de la boucle virtuelle correspondent si étroitement aux événements de la boucle inductive pendant la période mesurée.
Il est également important de noter que les boucles inductives, bien qu'elles soient largement utilisées comme référence, ne constituent pas une "vérité de base" parfaite. Leur détection peut varier en fonction de la géométrie et du placement de la boucle, de l'état de la chaussée, de l'étalonnage, des interférences électromagnétiques et de la dégradation à long terme, et certains types de véhicules ou cas particuliers peuvent être plus difficiles à détecter pour les boucles que d'autres. Cela signifie qu'une petite part des incohérences dans toute comparaison peut être due non seulement à la détection de boucles virtuelles, mais aussi aux limitations inhérentes et à la variabilité du monde réel des systèmes de boucles inductives.
Un Rôle Critique dans l'Activation des Feux de Circulation
L'une des applications les plus importantes de la technologie de boucle virtuelle de Flow Analytics by AGC est la gestion des feux de circulation. Lorsqu'un véhicule est détecté, l'information est directement transmise au système de contrôle des feux, déclenchant ainsi la réponse appropriée en temps réel.
Avec une précision de 99,83 %, les boucles virtuelles deviennent une base fiable pour l'une des fonctions les plus critiques en matière de sécurité dans la gestion du trafic urbain. Chaque détection manquée ou déclenchement erroné a de réelles conséquences sur le flux de trafic et la sécurité routière. C'est pourquoi ce niveau de précision est si important en pratique.
Ce que signifie 99,83 % en pratique
Ce niveau de précision signifie que les opérateurs de trafic, les urbanistes et les parties prenantes de la mobilité peuvent se fier aux données des boucles virtuelles avec la même confiance qu'ils accorderaient à un réseau de capteurs physique, tout en bénéficiant de :
- Déploiement plus rapide : pas de travaux routiers, pas de perturbation du flux de circulation
- Coûts significativement inférieurs : tant lors de l'installation que sur la durée de vie opérationnelle
- Portée de détection accrue : les véhicules sont identifiés plus tôt et de plus loin, permettant une meilleure anticipation et réponse
- Fiabilité toutes conditions, par tous les temps : LiDAR garantit des performances constantes jour et nuit, sous la pluie ou le soleil
- Activation fiable des feux de circulation : niveaux de précision qui répondent aux exigences du contrôle des signaux en temps réel.
Plus qu'un simple remplacement technologique
Faire correspondre des boucles inductives est un point de référence utile car elles constituent la base la plus courante utilisée aujourd'hui pour l'activation des feux de circulation et les comptages de trafic. Cependant, elles ne doivent pas être considérées comme la référence de ce qui est possible. Les boucles inductives fournissent généralement une détection fixe et binaire à des emplacements décidés lors de l'installation, et changer la couverture ou la logique nécessite souvent des travaux routiers. Remplacer des boucles physiques par des boucles virtuelles, c'est comme utiliser un smartphone pour remplacer un téléphone fixe : oui, vous pouvez passer l'appel, mais la véritable valeur réside dans tout ce que vous débloquez au-delà de cela.
Les boucles virtuelles peuvent être placées n'importe où, adaptées à autant de zones de détection que nécessaire et mises à jour dans le logiciel au fur et à mesure que les agencements et les priorités changent. Au-delà de la détection de présence, elles peuvent fournir des informations plus riches sur le trafic, telles que les catégories de véhicules, la vitesse, la direction, les mouvements de virage et certains événements basés sur des règles, par exemple une logique dédiée par voie ou par approche. Elles peuvent également être appliquées aux piétons et aux cyclistes, avec des règles spécifiques adaptées à chaque zone. Les boucles virtuelles sont souvent la base d'une intelligence d'intersection plus large et d'autres cas d'utilisation construits sur la même plateforme de détection et d'analyse.
Les boucles inductives ont bien fonctionné.
Prêt à les remplacer ? Demandez une démo :