
Following our latest development cycle, we conducted a rigorous benchmarking study comparing our virtual loop detection technology against traditional inductive loop sensors, the long-standing industry standard in traffic detection. The results confirmed what our team had been working toward: in a real-world benchmark, our virtual loops reached 99.83% inductive-loop event matching, demonstrating performance on par with physical infrastructure that has dominated the field for decades.
The Challenge We Set Out to Solve
Inductive loop sensors have earned their reputation. Embedded directly into road surfaces, they deliver reliable, precise vehicle detection data. But they come at a cost: significant installation investment, road disruption, and ongoing maintenance requirements that place a real burden on operators and infrastructure budgets.
Our virtual loops were designed as a smarter alternative. Powered by LiDAR sensors and advanced AI algorithms, they offer the same detection capability without touching the road surface. Compared to other inductive loop alternatives such as camera-based solutions, LiDAR brings a particularly important advantage: it tracks vehicles with high precision regardless of weather or lighting conditions, whether that means heavy rain, dense fog, or complete darkness. On top of that, it does so from greater distances than traditional inductive sensors are capable of.
Closing that accuracy gap with physical counterparts has always been the hard part. With this latest development, it is resolved.
How We Measured Accuracy
In this benchmark, “accuracy” refers to event matching between the two systems. In practice, that means: for each inductive loop detection event, we checked whether it had a single, unique corresponding virtual loop event. The result reflects a specific site, time period, and configuration. Event matching performance can vary depending on the context and road geometry (for example, road layout and induction loop configuration).
Over a 10-day period, using data gathered across eight inductive loops at one city intersection, 99.83% of inductive loop events found a unique match in the virtual loop data. This metric provides a clear indication of how closely virtual loops can replicate the detection events traffic operators already rely on.
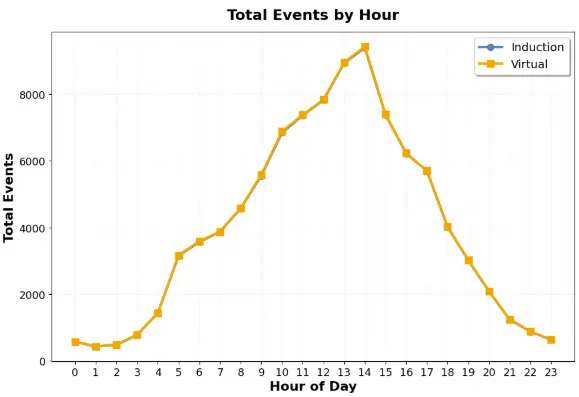
On this line chart, the inductive-loop and virtual-loop event lines largely sit on top of each other because the virtual loop detections match the inductive loop events so closely over the measured period.
It is also important to note that inductive loops, while widely used as a reference, are not a perfect “ground truth.” Their detection can vary with loop geometry and placement, pavement condition, calibration, electromagnetic interference, and long-term degradation, and certain vehicle types or edge cases can be more challenging for loops than others. That means a small share of mismatches in any comparison may be due not only to virtual loop detection, but also to the inherent limitations and real-world variability of inductive loop systems.
A Critical Role in Traffic Light Actuation
One of the most important applications of virtual loop technology from Flow Analytics by AGC is traffic light actuation. When a vehicle is detected, that information feeds directly into the traffic signal control system, triggering the appropriate response in real time.
At 99.83% accuracy, virtual loops become a dependable foundation for one of the most safety-critical functions in urban traffic management. Every missed detection or false trigger has real consequences on traffic flow and road safety. That is why this level of accuracy matters so much in practice.
What 99.83% Means in Practice
This level of accuracy means that traffic operators, city planners, and mobility stakeholders can rely on virtual loop data with the same confidence they would place in a physical sensor network, while benefiting from:
- Faster deployment: no road works, no disruption to traffic flow
- Significantly lower costs: both at installation and over the operational lifetime
- Greater detection range: vehicles are identified earlier and from further distances, enabling better anticipation and response
- All-weather, all-conditions reliability: LiDAR ensures consistent performance day and night, rain or shine
- Dependable traffic light actuation: accuracy levels that meet the demands of real-time signal control.
More Than Just a Technology Replacement
Matching inductive loops is a useful benchmark because they are the most common baseline used today for traffic signal actuation and traffic counts. However, they should not be treated as the reference for what is possible. Inductive loops typically provide fixed, binary detection at locations decided during installation, and changing coverage or logic often requires road works. Replacing physical loops with virtual loops is like using a smartphone to replace a landline phone: yes, you can make the call, but the real value is everything you unlock beyond that.
Virtual loops can be placed anywhere, scaled to as many detection zones as needed, and updated in software as layouts and priorities change. Beyond presence detection, they can deliver richer traffic insight such as vehicle categories, speed, direction, turning movements, and certain rule-based events, for example dedicated logic per lane or per approach. They can also be applied to pedestrians and cyclists, with specific rules tailored to each zone. Virtual loops are often the foundation for broader intersection intelligence and additional use cases built on the same sensing and analytics platform.
Inductive loops had a good run.
Ready to replace them? Request a demo: